Hm ich kann das nicht erkennen aber das klingt danach als wäre der Okto vielleicht falsch herum dran gebaut. Also Kopfüber. Die Rakete als solches sieht eigentlich ganz OK aus. Und dass sie ohne Sat funktioniert klingt schonmal gut. Aber der Satellit hat natürlich auch Auswirkungen. Hast du den Sat auch mal mit einer kleineren Rakete ohne Besatzung gestartet?
Beiträge von Cheesecake
-
-
1969 (Jahr 2)
Auch in diesem Jahr fehlen viele Bilder. Der zuständige Archivator wurde zwischenzeitlich entlassen und der Nachfolger bemüht sich jetzt darum noch einige Fotos aufzutreiben.
###############################################################################
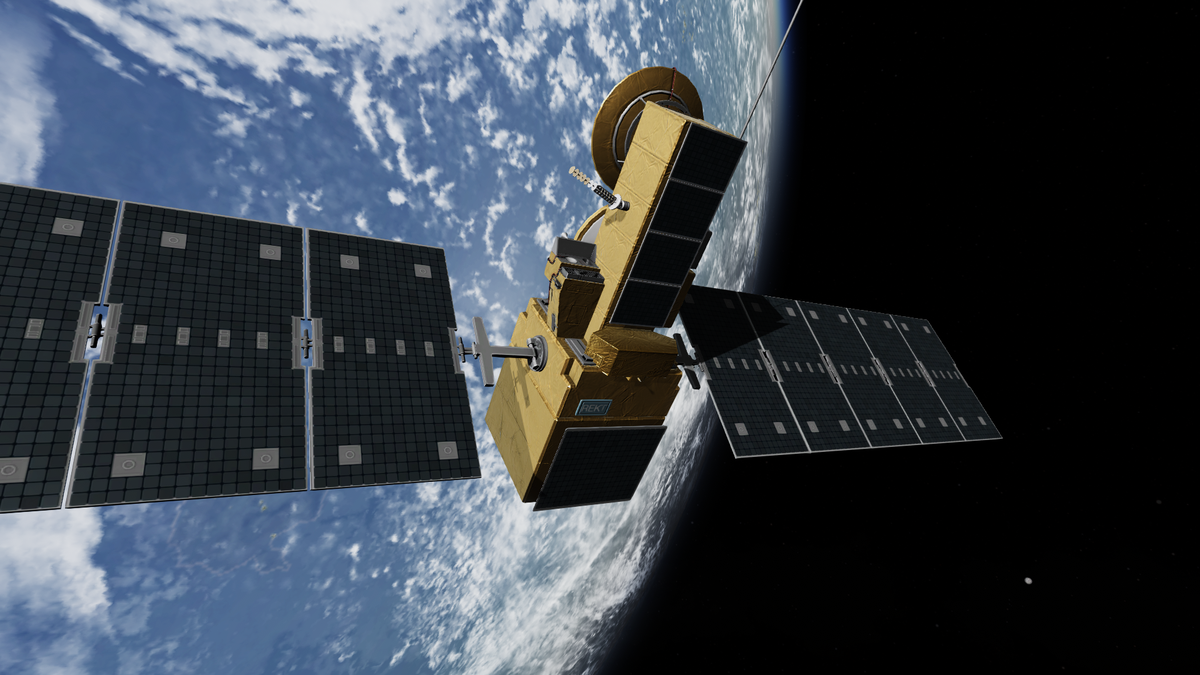
GEOS 1
Das Jahr beginnt mit einem Start des ersten geodätischen Satelliten, GEOS 1. Er soll die Oberfläche Kerbins kartographieren sowie weitere Messungen vornehmen. Dadurch erhofft man sich unter anderem Erkenntnisse im Aufspüren von Bodenschätzen.
Aufgrund Größe, Gewicht von rund 1,7 Tonnen und relativ hohem Orbit von 750km sowie einer Inklination von 75° ist hier eine leistungsfähige Rakete notwendig. Daher wird der Satellit mit der Titan III(23)D gestartet.
###############################################################################
Apollo 3
Crew: Jebediah Kerman, Bill Kerman, Bob Kerman
Apollo 3 war der erste bemannte Flug zum Mun. Jebediah Kerman hatte sich erhofft, als Erster auf dem Mun zu stehen. Allerdings wurde kein Landemodul mitgeschickt. Stattdessen flog man in einen Mun-Orbit und nach 3 Umrundungen kehrte man wieder nach Kerbin zurück. Während des Orbits unternahm Jeb aber eine EVA.
Der Flug war technisch ein voller Erfolg. So fand man heraus dass man deutlich zu viel Treibstoff dabei hatte. Dieser kann nun bei folgenden Missionen reduziert und dafür mehr Experimente und Ausrüstung mitgenommen werden.
Auch wenn Jeb nicht als erster Kerbal auf dem Mun in die Geschichte eingeht so ist er dennoch zufrieden dass er so viel zum Apollo-Programm beitragen durfte. Und es gibt ja auch noch Minmus…
Leider keine Bilder auffindbar.
###############################################################################
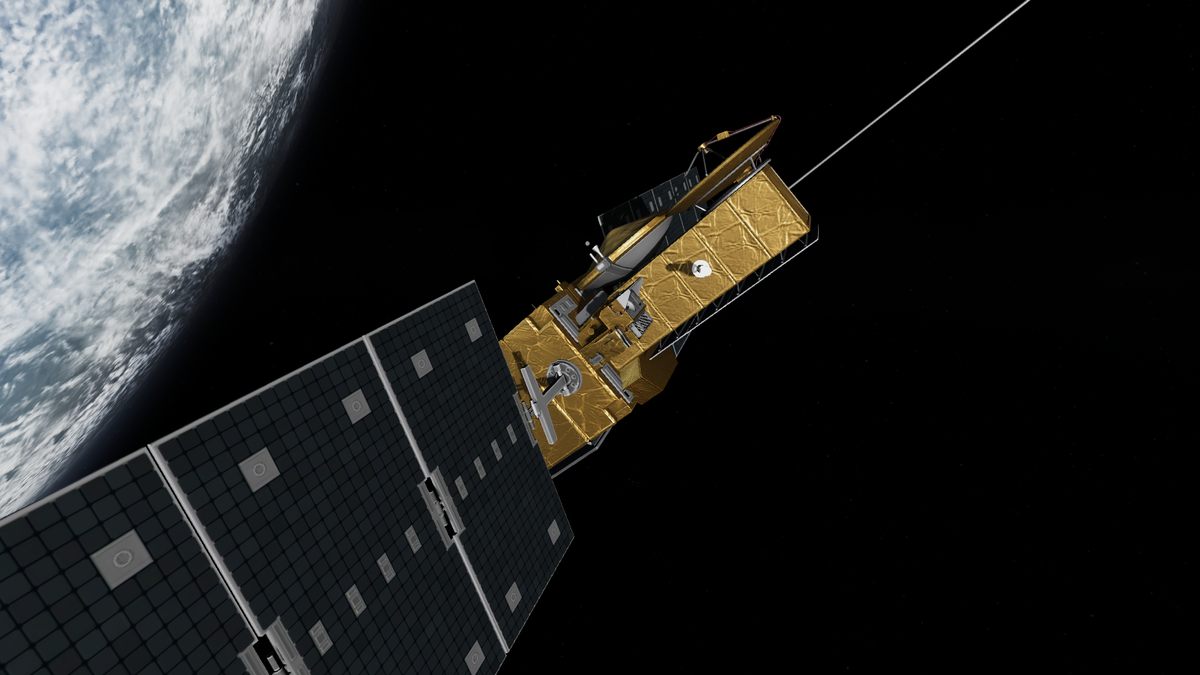
GEOS 2
Nach Apollo 3 wurde GEOS 2 gestartet. Äußerlich fast identisch zu GEOS 1, wurden nur einige Details in der Anordnung der Antenne und Scanner vorgenommen. Das Gewicht wurde dadurch leicht auf 1,75 Tonnen gesteigert. Gestartet wurde auch dieser Satellit mit einer Titan III(23)D
###############################################################################
Apollo 4
Crew: Valentina Kerman, Anslen Kerman, Maxschen Kerman
Apollo 4 flog ebenfalls zum Mun. Allerdings wurde hier das Gesamtsystem inkl. der Mun-Landefähre getestet. Valentina Kerman und Anslen Kerman koppelten die Landefähre ab und flogen bis in eine Höhe von 8 km an die Oberfläche heran. Danach kehrten sie zum Kommandomodul zurück. Auch hier wurden viele Erkenntnisse gesammelt und noch einige Anpassungen an der Landefähre vorgenommen.
Leider keine Bilder auffindbar.
###############################################################################
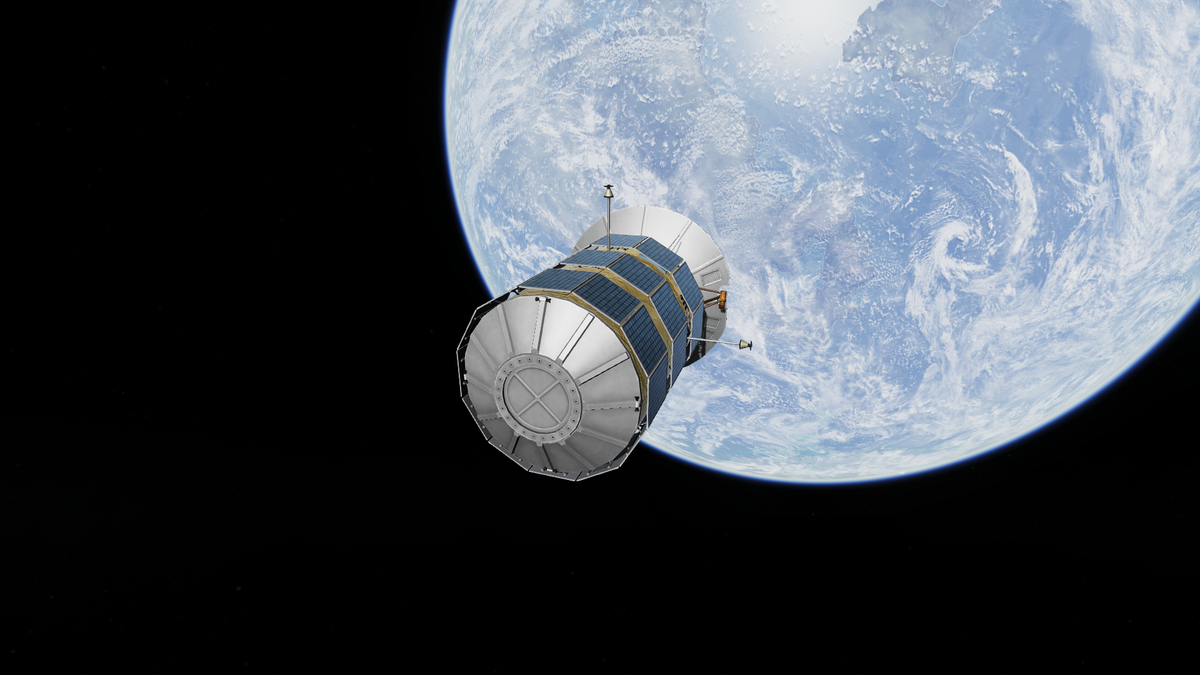
Syncom 1
Der erste Satellit des neuen Syncom-Kommunikationsnetzwerkes wurde gestartet. Der Satellit ist mit rund einer Tonne recht schwer und fliegt in einer Höhe von 1500km sowie einer Inklination von 45°. Als Träger wurde eine Atlas SLV3C verwendet.
###############################################################################
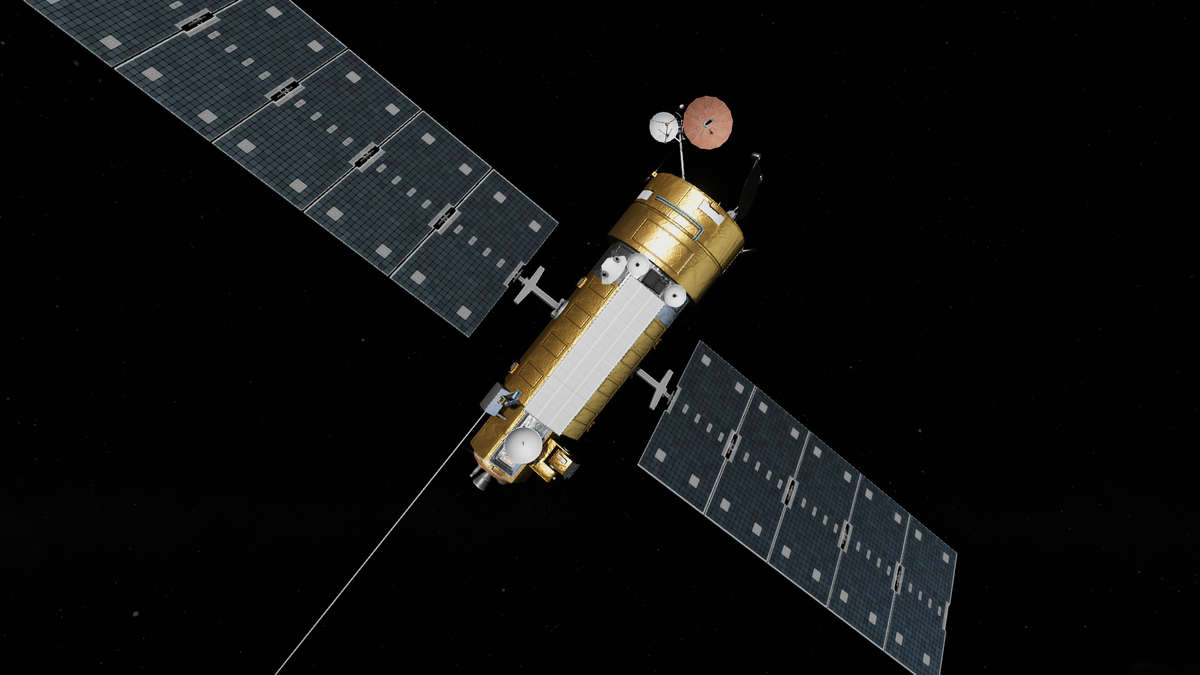
GEOS 3
Ein weiterer Satellit (GEOS 3) der GEOS-Reihe wurde gestartet. Allerdings handelt es sich um einen Satelliten der Block-II-Serie. Hierbei wurde der Satelliten-Bus deutlich überarbeitet und neuen Antennen ausgerüstet. Das macht ihn mit 2,1 Tonnen deutlich schwerer als die Block-I-Serie. Allerdings reicht auch bei der Block-II-Serie die Titan II(23)D.
###############################################################################
Apollo 5
Crew: Gernus Kerman, Benhan Kerman, Alner Kerman
Mit diesem Flug war die erste Mun-Landung geplant. Benhan Kerman sollte als Kommandant zusammen mit Alner Kerman landen während Gernus Kerman als Pilot des Kommandomoduls an Bord des Apollo-Raumschiffes bleibt.
Der Plan sah einen zweitägigen Aufenthalt auf der Oberfläche sowie 3 EVAs vor. Dabei sollten wissenschaftliche Daten sowie Mun-Gestein gesammelt und zurück nach Kerbin gebracht werden.
Die Mission war ein voller Erfolg. Bei der Landung gab es zwar ein paar Schwierigkeiten mit dem Landecomputer, aber Dank Benhan Kermn konnte das Landemodul manuell gelandet werden.
Die EVAS waren erfolgreich und es wurden diverse Gesteinsproben und Messungen gesammelt.

###############################################################################
Jahres-Statement der NASA:
Bisher gingen wir von 2-3 bemannten Landungen pro Jahr aus. Allerdings zwingen uns die Kosten sowie ein anderer Fokus nun diese Anzahl zu reduzieren um weitere Programme finanzieren zu können.
Aufgrund der insbesondere hohen Kosten der Saturn V wird die Anzahl der Starts zukünftig bei maximal 2 pro Jahr liegen. Allerdings sind hier auch Starts für andere Programme wie das Skylab-Programm inklusive. Außerdem sind unbemannte Versorgungsflüge im Rahmen des Apollo-Programms geplant, mit denen z.B. ein größeres Fahrzeug und ein Shelter für längere Aufenthalte gelandet werden sollen.
Dies bedeutet dass es in den kommenden Jahren (derzeitiger Haushaltsplan bis 1974) jeweils nur einen bemannten Flug zum Mun geben wird. Ausnahme ist hier das Jahr 1971. Für dieses Jahr ist mit Apollo 8 ein bemannter Vorbeiflug um Minmus geplant.
Langfristig möchten wir jedoch eine permanente Station auf dem Mun errichten, sofern die zukünftigen Trägersysteme (siehe unten) dies kostengünstig möglich machen.
Neben dem Apollo-Programm wird nun noch das Skylab-Programm gestartet, welches Studien über Langzeitaufenthalte durchführen und auswerten soll.
Um die Kosten für Flüge in den Orbit sowie zu Mun zu reduzieren, wird eine Expertengruppe verschiedene neue Ideen ausarbeiten wie z.B. ein wiederverwendbares Shuttle oder eine teilweise wiederverwendbare Saturn V. Der Arbeitstitel lautet New Generation Launchsystem, kurz NGL. Die Planungsphase ist bis etwa 1972 geplant. Danach soll bereits die Entwicklungsphase beginnen so dass etwa 1978 ein neues Trägersystem zur Verfügung steht.
Ausblick auf 1970:
Das GEOS und Syncom-Netzwerk wird weiter ausgebaut. Desweiteren sind mit Pioneer 6 (Duna) und 7 (Eve) zwei interplanetare Missionen geplant sowie mit Explorer 41 eine erste Sonde zu Minmus.
Außerdem steht mit Apollo 6 die zweite Mun-Landung an sowie der Start von Skylab (Skylab 1) und einer ersten Crew (Skylab 2), welche 30 Tage an Bord bleiben wird.
-
Tatsächlich kann man das nicht bewegen. Aber das macht schon Sinn. Wenn man den "bewaffnet", so heißt das glaub ich in der deutschen Übersetzung, dann kann man quasi andocken ohne Dockingport. Und dann kann man das Ding zurück nach kerbin bringen.
Bewegen kann man ihn nur wenn man das DLC mit den Robotic-Parts hat. Dann könnte man sich einen Roboterarm bauen.
-
Und mal wieder juckts in den Fingern und ich fange nochmal an.
Und wieder isses eine alternative zeitleiste. Also nicht wundern wenn es nicht alles korrekt ist
Leider habe ich erst später mit Screenshots angefangen, wodurch diese Anfangs durch Abwesenheit glänzen.
1968 (Jahr 1)
Das Apollo-Programm ist in vollem Gange und die USA wollen unbedingt den Wettlauf zum Mun gewinnen.
Um den Mun zu erkunden wurden bereits mehrere Sonden und Lander gestartet. Nach einigen Fehlschlägen wurden 1968 mit Lunar 4 und 5 erfolgreich zwei Sonden gelandet.
Lunar 4:
###############################################################################
Zeitgleich war man im Apollo-Programm von der Konstruktions- in die Testphase übergegangen und die ersten beiden Testflüge in den Kerbin-Orbit sollten stattfinden (Kommandant in rot):
- Apollo 1 mit der Crew Herderd Kerbal, Eberdel Kerbal und Jutda Kerbal.
- Apollo 2 mit der Crew Ansgar Kerman, Andtrick Kerman und Inton Kerman.
Apollo 1
Crew: Herderd Kerbal, Eberdel Kerbal und Jutda Kerbal.
Nach 2 erfolgreichen unbemannten Flügen wurde zum ersten mal eine Saturn IC, eine Weiterentwicklung der Saturn IB, für einen bemannten Flug verwendet. Hierbei sollte nicht das gesamte System getestet werden sondern lediglich die Kommandokapsel und das Servicemodul. Das Landemodul sollte nicht gestartet werden.
Insgesamt verlief der Flug erfolgreich. Allerdings wurden doch recht viele Mängel offensichtlich. Insbesondere in den Lebenerhaltungssystemen. Diese wurden nach der Landung umgehend behoben.
Herderd Kerman unternahm während des Flugs 2 Weltraumausstiege.
Die Saturn IC erwies sich als zuverlässig. Sie soll zukünftig für Crew-Transfers in den Kerbin-Orbit oder mittelschwere Nutzlasten genutzt werden.
Dauer der Mission: 3 Tage
###############################################################################
Apollo 2
Crew: Ansgar Kerman, Andtrick Kerman und Inton Kerman
Erster bemannter Start einer Saturn V inkl. Mun-Lander. Allerdings ging die Reise nicht zum Mun sondern lediglich in den Kerbin-Orbit. Hier wurde dann das Gesamtsystem inkl. Ab- und Ankoppeln des Landemoduls an die Kommandokapsel mehrfach erfolgreich getestet. Dabei entfernte sich das Landemodul mit Inton Kerman und Ansgar Kerman an Bord mehrere hundert Kilometer von der Kommandokapsel mit Andtrick Kerman.
Dauer der Mission: 5 Tage
###############################################################################
RELAY 1-5
Um einen Reibungslosen Kontakt zu den Apollo-Raumschiffen zu halten, wurde auch ein erstes, einfaches Satelliten-Kommunikationssystem aufgebaut. Es handelt sich dabei um 5 Satelliten der RELAY-Baureihe. Sie wurden allesamt mit Delta E in eine 45° Inklination gestartet. Das System schließt zwar nicht alle Lücken aber verbessert die kommunikation zusammen mit den weltweiten Bodenstationen enorm.
Die Delta E hat sich bei diesem Programm als Träger für kleine, leichte Satelliten bewährt.
###############################################################################
Ausblicke: Für 1969 sind insgesamt 3 Flüge im Rahmen des Apollo-Programms eingeplant. Davon soll mindestens einer auf Mun landen. Des weiteren hat die NASA angekündigt bereits im Jahr 1970 eine Raumstation zu starten. Damit möchte man die Auswirkungen von längeren Aufenthalten im All erforschen.
Weiteres Ziel wird sein, das Kommunikationssystem durch hochfliegende Satelliten deutlich zu verbessern. Hier wird bereits an der Syncom-Serie gearbeitet.
Ebenso soll die Erforschung von kerbin nicht zu kurz kommen. Hierzu arbeitet man an einer Satellitenserie zur Kartographierung.
-
Hm, dann könnte ich mir nur vorstellen dass Bill noch nicht ausreichend Skills hat. Bin mir da aber nicht sicher da ich bisher immer nur mit KIS/KAS gearbeitet habe.
-
Hier ist mal ein Video.
https://www.youtube.com/watch?v=osKBLOHvvBQ
Aber: du hast da Bob im Bild. Der ist doch kein Techniker sondern Wissenschaftler. Anbauen kann natürlich nur ein techniker, also Bill.
Du musst auch nicht das Rad ins Inventar vom Kerbal schieben sondenr kannst es direkt aus dem Behälter des Landers heraus anbauen.
-
Also vorab: das hat erstmal nichts mit Mun oder einem Flug dahin zu tun. All ist All. Und: auch wenn du zum Mond fliegst bist du bereits in einem Orbit. Und zwar in einem Orbit um Kerbin. Orbit heißt ja nicht dass du nur kreisrund in 200km über Kerbin fliegst. Auch ein 100x11.000km ist ein Orbit.;)
Ich stelle jetzt mal Mutmaßungen auf da ich weder ein Bild des Schifs noch die Crew kenne.
Wenn du mit einem Piloten fliegst und dann aussteigst dann wird SAS ausgeschaltet. Durch das Aussteigen bekommt das Schiff dann meist einen kleinen Drall und dreht sich. Denn: wenn der Pilot auf EVA ist, wer sollte dann das Schiff auf Kurs halten? Also logisch dass sich das Schiff dreht.
2 Lösungen:
- mit mehr als einem Kerbal fliegen. Der Pilot bleibt an Bord, der Techniker oder Wissenschaftler steigt aus. Dann bleibt SAS im Schiff aktiv.
- Zusätzlich einen Probecore, also einen Octo etc. verbauen. Der übernimmt die Steuerung wenn dein Pilot aussteigt. dann geht das auch mit einem Kerbal.
Allein durch SAS deaktivieren ohne EVA sollte aber genau das passieren: nichts. Denn woher sollte der Drall kommen?
Allerdings können auch Probleme auftreten wenn du z.B. keinen Piloten im Schiff hast. Also z.B. nur einen Wissenschaftler.Hier wären also Bilder vom Schiff durchaus hilfreich.
Kleine Möglichkeit, welche ich auch schon mal gelesen habe wäre da noch ein Problem mit einem angeschlossenen Joystick. Da hatte den jemand in die Ecke gestellt und vergessen dass er angeschlossen war. Da ist dann irgendein Gegenstand an den Joystick gekommen und hat das Schiff permanent gedreht.
-
Hast du Bob mal einen Reparaturkoffer ins Inventar gelegt?
-
Das sind nur ein paar Beispiele. Man kann auch ganz andere Designs entwerfen.
-
Die Solarpanels kannst du ja alle separat ausfahren. So könnte man die vom Rover erstmal eingeklappt lassen.
Grundsätzlich baue ich die Rover nicht in dem Hangar sondern auch im VAB, also in dem hohen Gebäude wo auch Raketen gebaut werden. Da baue ich dann immer alles komplett, also Lander und Rover etc.
Will man auch Kerbals landen dann sollte man einen Lander bauen. Wenn man nur einen Rover landen möchte dann empfiehlt sich ein Skycrane.
Ich leg mal schnell einen Stock-GameData an und baue mal schnell was zusammen.
Edit:
Hier mal Beispiele:
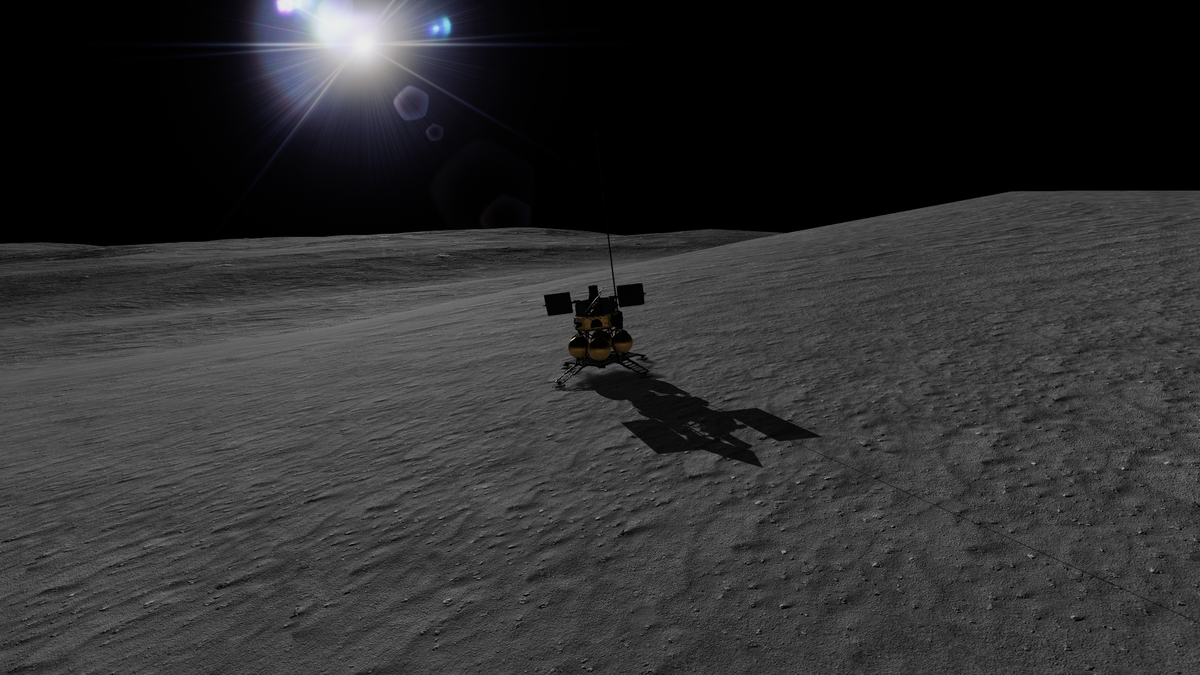
Skycrane:

Nach dem Landen wird der Skycrane abgekoppelt und fliegt weg. Er crasht dann irgendwo auf die Oberfläche. In der Realität wurde dieses Konzept bei den Mars-Rovern Curiosity und Perseverance (hier gibt es bei der NASA sogar original-Filmmaterial der Landung) erfolgreich eingesetzt.
Lander 1:
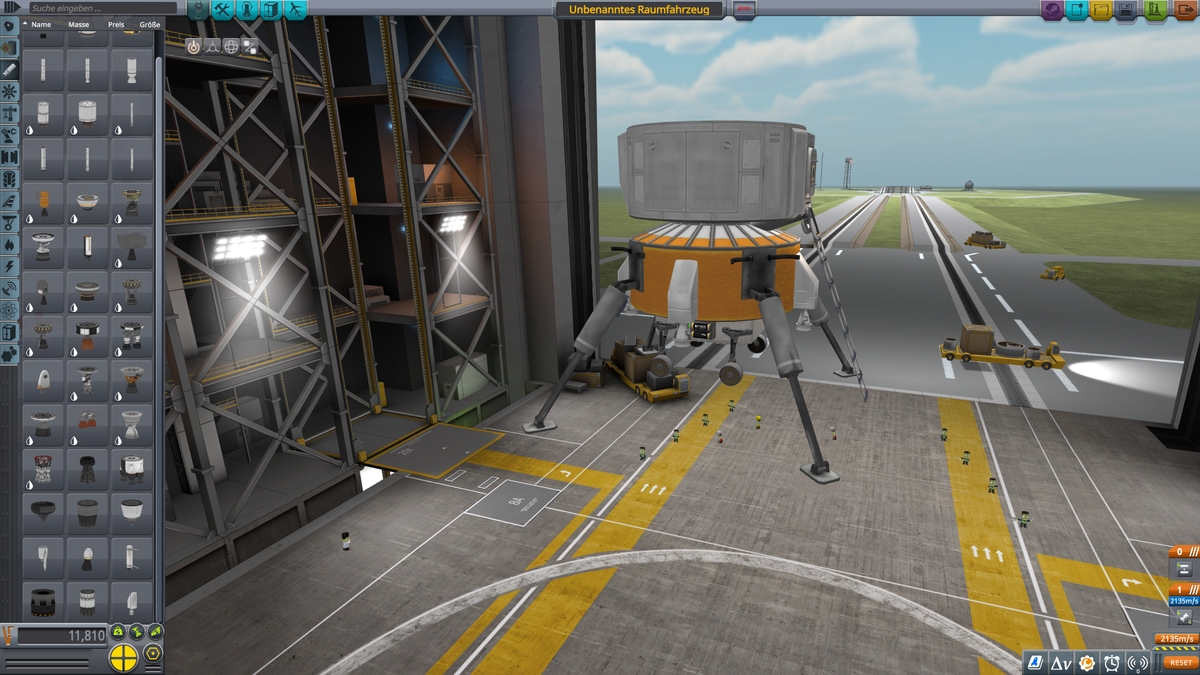
Hier ist der Rover unten drunter angebracht. Das ist am unproblematischsten denn dann hängt er genau im Schwerpunkt und du hast nicht mit Asymmetrie zu kämpfen.
Hierzu gibt es kein direktes reales Beispiel. Aber bei den späten Apollo-Missionen wurde so ein Rover mitgebracht. Der war allersings seitlich angebracht. Das geht auch in KSP aber da hat man mit einem Ungleichgewicht auf einer Seite zu kämpfen und muss das irgendwie ausgleichen.Lander 2:
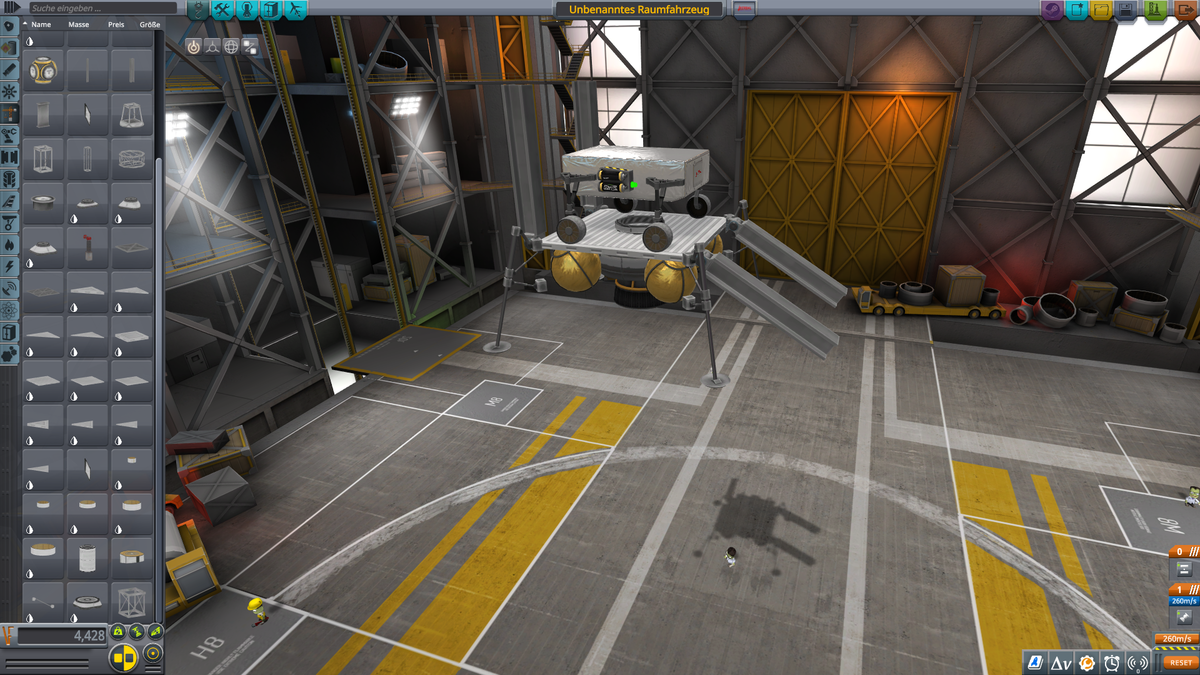
Plattform wo der Rover oben drauf steht. Ähnlich wie bei der sowjetischen Luna 17, die den Mondrover Lunochod gelandet hat oder der chinesische Rover. Hierbei sind dann seitlich Rampen notwendig wo der Rover herunter fahren kann. Das kann man mit den Robotic-Parts realisieren.
Achtung: die hier schnell zusammen gebauten Lander sind nicht getestet und dienen ausschließlich der Erklärung.
Ich mache immer einen Probecore oben auf den Skycrane oder an die Plattform. Darauf kann man zwar verzichten aber das vereinfacht das Steuern da der Rover ja in einer anderen Dimension steuert als der Skycrane oder der lander. Du musst dann nur beim Bauen das Root-Part erstmal auf den Probecore des Skycranes/Landers legen oder im Flug über das Rechtsklick-menü auf "Von hier steuern".
Hoffe ich konnte etwas helfen.
-
Wenn man bei der Mission das Inventar öffnet dann sieht man dort auch ob andere Kerbals in Reichweite sind.
Bei den Brennstoffzellen bin ich mir nicht ganz sicher aber ich meine die nutzen in Stock Flüssigtreibstoff und Oxidator. Ich spiele meist mit Mods und da nutzen die oft Wasserstoff und Sauerstoff, wie in der Realität. Das gibts aber in Stock nicht.
-
Einen Antrieb braucht man nicht denn die Rover-Räder haben den integriert. Sie brauchen dafür Strom.
Warum die Brennstoffzelle mit einem Solarpanel aufladen? Die Brennstoffzelle ist doch selbst ein Energielieferant. Du musst sie nur starten. Dann produziert sie Strom (soweit ich weiß benötigt sie dazu eben LFO, der ja schon vorhanden ist). Der kleine Speicher in
So wie ich das sehe brauchst du lediglich die Räder. Alles andere ist schon da. Ich würde aber noch Batterien mitnehmen denn wenn die Räder mehr Strom brauchen als die Brennstoffzellen produzieren dann sind die Batterien schnell leer. Dann kommst du nur eine kurze Strecke weit und musst dann erstmal durch die Brennstoffzellen die Batterien aufladen. Momentan hast du nur 2x 50 EC in den Brennstoffzellen + 10 EC im HECS. zusammen also 110. Ggf. etwas wenig.
Transportieren kannst du die Teile in einem Container. Da gibts welche mit größerem Volumen. Entweder dann direkt neben dem Rover landen (auf Minmus sollte das recht leicht sein) oder eben mit den Kerbals die restliche Strecke tragen. Wenn mehrere Kerbals da sind dann "unterstützen" die anderen und du kannst mehr tragen. Batterien und die kleinen Räder sollten aber recht leicht sein.
Oder du baust einen kleinen Rover mit einem Container, fliegst zum Mun, koppelst den Rover ab und fährst dann mit den Kerbals direkt mit den Bauteilen neben den zu reparierenden Rover. -
Glaube das hier erledigt das Problem mit dem Triebwerk. Linuxgurugamer hat nen Fix gebastelt:
https://spacedock.info/mod/2940/TutorialFixes
Und hier auch der Thread im Forum:
-
Jep, Wintermancer kann ich auch empfehlen. Er war auch hier im Forum aktiv und hat einen eigenen Twitch-Kanal:
-
Hm, wirklich seltsam. Kann ich mir nur durch einen Bug erklären. Aber: aus Erfahrung kann ich sagen dass man das auch gut ohne Tutorial lernen kann. Allerdings gehen hier die Meinungen weit auseinandern. Manch einer sagt dass die Karriere besser ist da man zu Anfang nur wenige Bauteile hat. Andere sagen dass der Sandbox-Modus besser ist da man direkt auf alles Zugriff hat und somit experimentieren kann.
Kleine Anmerkung zu deiner Beschreibung des mittleren Bildes (mag banal erscheinen aber später sicher wichtig): das kleine Triebwerk (glaube das ist das Floh) ist nicht für die 1. Stufe sondern für die 2. Stufe. Die 1. Stufe ist immer die, die am Boden gezündet wird. Selbst 2. Stufe ist nicht ganz korrekt sondern eher allgemein für die Oberstufe denn eine Rakete kann mehr als 2 Stufen haben und das Floh ist dann meist für die letzte Stufe.
Wenn du Unterstützung beim Bau einer Rakete brauchst dann können wir das auch gern hier im Forum machen. Ich spiele zwar schon seit Jahren nicht mehr Stock aber das ist ja egal.
-
Hm, mit dem Tutorial kenne ich mich nicht aus. Das gabs zu Beginn meiner KSP-Karriere noch nicht. Könnte ggf. tatsächlich ein Bug sein. Oder irgendwas wurde da übersehen.
Kannst du mal einen Screenshot (mit F1, zu finden dann unter SteamLibrary\steamapps\common\Kerbal Space Program\Screenshots) und hier hochladen? Am besten von der Vorgabe, also was du machen sollst, und vom VAB (sorry, Fahrzeugfabrik, ich bin immer noch im Englisch-Modus weil es früher kein Deutsch gab). -
Guten Morgen und herzlich Willkommen bei den Verrückten. Viel Spaß mit KSP und vielleicht auch bald KSP2.
-
Das SAS funktioniert genau so wie mit einem Piloten. Du brauchst ahlt nur einen "Probecore" da dran. Lässt sich dann genau so einschalten (mit "T") und bedienen. Aber: nicht jeder "Probecore" hat das komplette SAS.
Hier mal eine Liste (keine Ahnung ob die aktuell ist). Ich vermute mal dass der Duckdischnik (deutsche Übersetzung) der Stayputnik ist:
https://wiki.kerbalspaceprogram.com/wiki/Probe
Da kann man dann sehen dass der Stayputnik kein SAS hat. Du musst also einen anderen Probecore nehmen wie den OKTO 2 oder HECS2.
-

Ich könnte schon wieder zurück nach Kerbal. Aber is das echt der Sinn des Spiels? Wenn ein Fehler passiert ist muss man zurück fliegen und die Mission abbrechen? Da verliert man doch endlos Kohle dabei oder?
Warum sollte das nicht Sinn des Spiels sein dass du eine Mission neu starten musst? In der Realität ist das ja ähnlich. Da kannste auch nicht nen Raumschiff zum Mond schicken und wenn da einer was falsch berechnet hat einfach umplanen. Dafür reicht dann der treibstoff nicht aus.
In KSP kann man, anders als in der Realität, natürlich viel mehr Treibstoff mitnehmen. So hat man genug Reserven.
Aber genau darin liegt ja der Reiz: mit möglichst wenig Treibstoff weit zu kommen.
-
Haha, ich wollte ja nicht direkt rausposaunen von wem ich den gekauft habe.